
Inner/Outer Surface Colormap¶
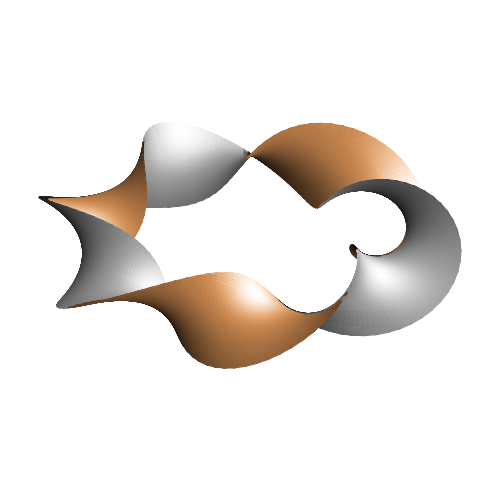
This technique can be used to visualize the front and back of an orientable surface.
mapping from normals uses the colormap half corresponding the surface side which is facing the view, based on the face normals relative to the view direction (direction=ax)
shading also uses the relative direction to the view. In this case, the lighting source direction is the default since the direction argument has not been set.

import numpy as np
from matplotlib import pyplot as plt
import s3dlib.surface as s3d
import s3dlib.cmap_utilities as cmu
#.. Binary colormap used to visualize the inner/outer surfaces.
# 1. Define function to examine .....................................
def twistFunction(rtz,twists=6) :
r,t,z = rtz
# Note: sliced surface needed due to discontinuity @ t=0 if twists is odd
thickness = 0.33
w = thickness*z
phi = 0.5*t*twists
R = 1 + w * np.cos(phi)
Z = w * np.sin(phi)
return R,t,Z
# 2. Setup and map surfaces .........................................
rez = 5
bcmap = cmu.binary_cmap('silver', 'sandybrown', name='slvr_brwn' )
surface = s3d.CylindricalSurface(rez, basetype='squ_s', cmap=bcmap)
surface.map_geom_from_op( twistFunction )
# 3. Construct figures, add surface, plot ...........................
minmax = (-.9,.9)
fig = plt.figure(figsize=plt.figaspect(1))
ax = plt.axes(projection='3d')
ax.set(xlim=minmax, ylim=minmax, zlim=minmax)
ax.set_axis_off()
ax.view_init(azim=-70)
surface.map_cmap_from_normals(direction=ax)
ax.add_collection3d(surface.shade(ax=ax).hilite(ax=ax))
fig.tight_layout(pad=0)
plt.show()