
Multiple Geometric Maps¶
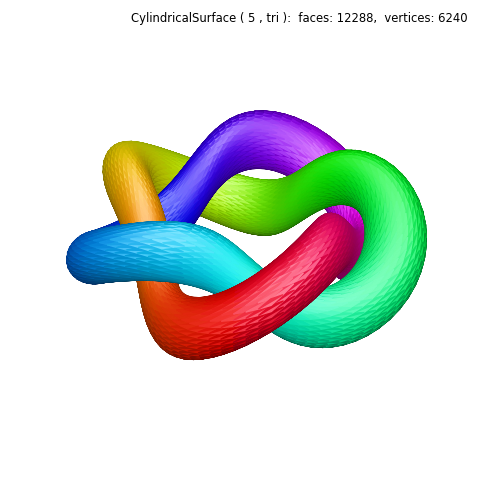
This example demonstrates geometric mapping from one surface to another in sequence. First, a cylindrical surface is mapped to a torus using the function, torusFunc. This surface geometry is then further mapped using the knot function to produce the final geometry.
import numpy as np
from matplotlib import pyplot as plt
import s3dlib.surface as s3d
#.. Multiple Geometric Maps
# 1. Define functions to examine ....................................
def torusFunc(rtz) :
r,t,z = rtz
ratio = .2
Z = ratio*np.sin(z*np.pi)
R = r + ratio*np.cos(z*np.pi)
return R,t,Z
def knot(rtz) :
r,t,z = rtz
R = r*( (1+np.cos(5*t))/2 + 0.65*(1+np.cos(np.pi + 5*t))/2 )
Z = z + 0.25*np.sin(5*t)
return R,2*t,Z
# 2. Setup and map surfaces .........................................
rez = 5
torus = s3d.CylindricalSurface(rez)
torus.map_cmap_from_op( lambda rtz : rtz[1] , 'hsv_r')
torus.map_geom_from_op( torusFunc )
torus.map_geom_from_op( knot )
# 3. Construct figure, add surfaces, and plot ......................
fig = plt.figure(figsize=plt.figaspect(1))
fig.text(0.975,0.975,str(torus), ha='right', va='top', fontsize='smaller', multialignment='right')
ax = plt.axes(projection='3d', aspect='equal')
minmax = (-.8,.8)
ax.set(xlim=minmax, ylim=minmax, zlim=minmax )
ax.set_axis_off()
ax.view_init(azim=0)
ax.add_collection3d(torus.shade().hilite(.5))
fig.tight_layout()
plt.show()